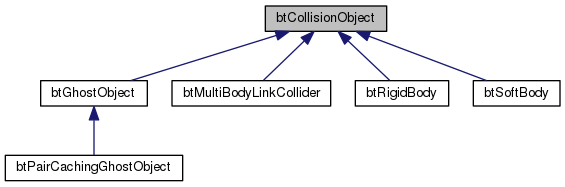
btCollisionObject can be used to manage collision detection objects. More...
#include <btCollisionObject.h>

Public Types | |
| enum | CollisionFlags { CF_STATIC_OBJECT = 1, CF_KINEMATIC_OBJECT = 2, CF_NO_CONTACT_RESPONSE = 4, CF_CUSTOM_MATERIAL_CALLBACK = 8, CF_CHARACTER_OBJECT = 16, CF_DISABLE_VISUALIZE_OBJECT = 32, CF_DISABLE_SPU_COLLISION_PROCESSING = 64, CF_HAS_CONTACT_STIFFNESS_DAMPING = 128, CF_HAS_CUSTOM_DEBUG_RENDERING_COLOR = 256, CF_HAS_FRICTION_ANCHOR = 512, CF_HAS_COLLISION_SOUND_TRIGGER = 1024 } |
| enum | CollisionObjectTypes { CO_COLLISION_OBJECT =1, CO_RIGID_BODY =2, CO_GHOST_OBJECT =4, CO_SOFT_BODY =8, CO_HF_FLUID =16, CO_USER_TYPE =32, CO_FEATHERSTONE_LINK =64 } |
| enum | AnisotropicFrictionFlags { CF_ANISOTROPIC_FRICTION_DISABLED =0, CF_ANISOTROPIC_FRICTION = 1, CF_ANISOTROPIC_ROLLING_FRICTION = 2 } |
Public Member Functions | |
| BT_DECLARE_ALIGNED_ALLOCATOR () | |
| bool | mergesSimulationIslands () const |
| const btVector3 & | getAnisotropicFriction () const |
| void | setAnisotropicFriction (const btVector3 &anisotropicFriction, int frictionMode=CF_ANISOTROPIC_FRICTION) |
| bool | hasAnisotropicFriction (int frictionMode=CF_ANISOTROPIC_FRICTION) const |
| void | setContactProcessingThreshold (btScalar contactProcessingThreshold) |
| the constraint solver can discard solving contacts, if the distance is above this threshold. More... | |
| btScalar | getContactProcessingThreshold () const |
| bool | isStaticObject () const |
| bool | isKinematicObject () const |
| bool | isStaticOrKinematicObject () const |
| bool | hasContactResponse () const |
| btCollisionObject () | |
| virtual | ~btCollisionObject () |
| virtual void | setCollisionShape (btCollisionShape *collisionShape) |
| const btCollisionShape * | getCollisionShape () const |
| btCollisionShape * | getCollisionShape () |
| void | setIgnoreCollisionCheck (const btCollisionObject *co, bool ignoreCollisionCheck) |
| virtual bool | checkCollideWithOverride (const btCollisionObject *co) const |
| void * | internalGetExtensionPointer () const |
| Avoid using this internal API call, the extension pointer is used by some Bullet extensions. More... | |
| void | internalSetExtensionPointer (void *pointer) |
| Avoid using this internal API call, the extension pointer is used by some Bullet extensions If you need to store your own user pointer, use 'setUserPointer/getUserPointer' instead. More... | |
| int | getActivationState () const |
| void | setActivationState (int newState) const |
| void | setDeactivationTime (btScalar time) |
| btScalar | getDeactivationTime () const |
| void | forceActivationState (int newState) const |
| void | activate (bool forceActivation=false) const |
| bool | isActive () const |
| void | setRestitution (btScalar rest) |
| btScalar | getRestitution () const |
| void | setFriction (btScalar frict) |
| btScalar | getFriction () const |
| void | setRollingFriction (btScalar frict) |
| btScalar | getRollingFriction () const |
| void | setSpinningFriction (btScalar frict) |
| btScalar | getSpinningFriction () const |
| void | setContactStiffnessAndDamping (btScalar stiffness, btScalar damping) |
| btScalar | getContactStiffness () const |
| btScalar | getContactDamping () const |
| int | getInternalType () const |
| reserved for Bullet internal usage More... | |
| btTransform & | getWorldTransform () |
| const btTransform & | getWorldTransform () const |
| void | setWorldTransform (const btTransform &worldTrans) |
| btBroadphaseProxy * | getBroadphaseHandle () |
| const btBroadphaseProxy * | getBroadphaseHandle () const |
| void | setBroadphaseHandle (btBroadphaseProxy *handle) |
| const btTransform & | getInterpolationWorldTransform () const |
| btTransform & | getInterpolationWorldTransform () |
| void | setInterpolationWorldTransform (const btTransform &trans) |
| void | setInterpolationLinearVelocity (const btVector3 &linvel) |
| void | setInterpolationAngularVelocity (const btVector3 &angvel) |
| const btVector3 & | getInterpolationLinearVelocity () const |
| const btVector3 & | getInterpolationAngularVelocity () const |
| int | getIslandTag () const |
| void | setIslandTag (int tag) |
| int | getCompanionId () const |
| void | setCompanionId (int id) |
| int | getWorldArrayIndex () const |
| void | setWorldArrayIndex (int ix) |
| btScalar | getHitFraction () const |
| void | setHitFraction (btScalar hitFraction) |
| int | getCollisionFlags () const |
| void | setCollisionFlags (int flags) |
| btScalar | getCcdSweptSphereRadius () const |
| Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm:: More... | |
| void | setCcdSweptSphereRadius (btScalar radius) |
| Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm:: More... | |
| btScalar | getCcdMotionThreshold () const |
| btScalar | getCcdSquareMotionThreshold () const |
| void | setCcdMotionThreshold (btScalar ccdMotionThreshold) |
| Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold. More... | |
| void * | getUserPointer () const |
| users can point to their objects, userPointer is not used by Bullet More... | |
| int | getUserIndex () const |
| int | getUserIndex2 () const |
| void | setUserPointer (void *userPointer) |
| users can point to their objects, userPointer is not used by Bullet More... | |
| void | setUserIndex (int index) |
| users can point to their objects, userPointer is not used by Bullet More... | |
| void | setUserIndex2 (int index) |
| int | getUpdateRevisionInternal () const |
| void | setCustomDebugColor (const btVector3 &colorRGB) |
| void | removeCustomDebugColor () |
| bool | getCustomDebugColor (btVector3 &colorRGB) const |
| bool | checkCollideWith (const btCollisionObject *co) const |
| virtual int | calculateSerializeBufferSize () const |
| virtual const char * | serialize (void *dataBuffer, class btSerializer *serializer) const |
| fills the dataBuffer and returns the struct name (and 0 on failure) More... | |
| virtual void | serializeSingleObject (class btSerializer *serializer) const |
Protected Attributes | |
| btTransform | m_worldTransform |
| btTransform | m_interpolationWorldTransform |
| m_interpolationWorldTransform is used for CCD and interpolation it can be either previous or future (predicted) transform More... | |
| btVector3 | m_interpolationLinearVelocity |
| btVector3 | m_interpolationAngularVelocity |
| btVector3 | m_anisotropicFriction |
| int | m_hasAnisotropicFriction |
| btScalar | m_contactProcessingThreshold |
| btBroadphaseProxy * | m_broadphaseHandle |
| btCollisionShape * | m_collisionShape |
| void * | m_extensionPointer |
| m_extensionPointer is used by some internal low-level Bullet extensions. More... | |
| btCollisionShape * | m_rootCollisionShape |
| m_rootCollisionShape is temporarily used to store the original collision shape The m_collisionShape might be temporarily replaced by a child collision shape during collision detection purposes If it is NULL, the m_collisionShape is not temporarily replaced. More... | |
| int | m_collisionFlags |
| int | m_islandTag1 |
| int | m_companionId |
| int | m_worldArrayIndex |
| int | m_activationState1 |
| btScalar | m_deactivationTime |
| btScalar | m_friction |
| btScalar | m_restitution |
| btScalar | m_rollingFriction |
| btScalar | m_spinningFriction |
| btScalar | m_contactDamping |
| btScalar | m_contactStiffness |
| int | m_internalType |
| m_internalType is reserved to distinguish Bullet's btCollisionObject, btRigidBody, btSoftBody, btGhostObject etc. More... | |
| void * | m_userObjectPointer |
| users can point to their objects, m_userPointer is not used by Bullet, see setUserPointer/getUserPointer More... | |
| int | m_userIndex2 |
| int | m_userIndex |
| btScalar | m_hitFraction |
| time of impact calculation More... | |
| btScalar | m_ccdSweptSphereRadius |
| Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm:: More... | |
| btScalar | m_ccdMotionThreshold |
| Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold. More... | |
| int | m_checkCollideWith |
| If some object should have elaborate collision filtering by sub-classes. More... | |
| btAlignedObjectArray< const btCollisionObject * > | m_objectsWithoutCollisionCheck |
| int | m_updateRevision |
| internal update revision number. It will be increased when the object changes. This allows some subsystems to perform lazy evaluation. More... | |
| btVector3 | m_customDebugColorRGB |
Detailed Description
btCollisionObject can be used to manage collision detection objects.
btCollisionObject maintains all information that is needed for a collision detection: Shape, Transform and AABB proxy. They can be added to the btCollisionWorld.
Definition at line 49 of file btCollisionObject.h.
Member Enumeration Documentation
| Enumerator | |
|---|---|
| CF_ANISOTROPIC_FRICTION_DISABLED | |
| CF_ANISOTROPIC_FRICTION | |
| CF_ANISOTROPIC_ROLLING_FRICTION | |
Definition at line 159 of file btCollisionObject.h.
Definition at line 131 of file btCollisionObject.h.
Definition at line 146 of file btCollisionObject.h.
Constructor & Destructor Documentation
| btCollisionObject::btCollisionObject | ( | ) |
Definition at line 21 of file btCollisionObject.cpp.
|
virtual |
Definition at line 57 of file btCollisionObject.cpp.
Member Function Documentation
| void btCollisionObject::activate | ( | bool | forceActivation = false | ) | const |
Definition at line 72 of file btCollisionObject.cpp.
| btCollisionObject::BT_DECLARE_ALIGNED_ALLOCATOR | ( | ) |
|
inlinevirtual |
Reimplemented in btSoftBody, btRigidBody, and btMultiBodyLinkCollider.
Definition at line 673 of file btCollisionObject.h.
|
inline |
Definition at line 584 of file btCollisionObject.h.
|
inlinevirtual |
Reimplemented in btMultiBodyLinkCollider.
Definition at line 256 of file btCollisionObject.h.
| void btCollisionObject::forceActivationState | ( | int | newState | ) | const |
Definition at line 67 of file btCollisionObject.cpp.
|
inline |
Definition at line 282 of file btCollisionObject.h.
|
inline |
Definition at line 172 of file btCollisionObject.h.
|
inline |
Definition at line 389 of file btCollisionObject.h.
|
inline |
Definition at line 394 of file btCollisionObject.h.
|
inline |
Definition at line 507 of file btCollisionObject.h.
|
inline |
Definition at line 512 of file btCollisionObject.h.
|
inline |
Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm::
Definition at line 496 of file btCollisionObject.h.
|
inline |
Definition at line 485 of file btCollisionObject.h.
|
inline |
Definition at line 228 of file btCollisionObject.h.
|
inline |
Definition at line 233 of file btCollisionObject.h.
|
inline |
Definition at line 453 of file btCollisionObject.h.
|
inline |
Definition at line 361 of file btCollisionObject.h.
|
inline |
Definition at line 193 of file btCollisionObject.h.
|
inline |
Definition at line 356 of file btCollisionObject.h.
|
inline |
Definition at line 574 of file btCollisionObject.h.
|
inline |
Definition at line 290 of file btCollisionObject.h.
|
inline |
Definition at line 318 of file btCollisionObject.h.
|
inline |
Definition at line 474 of file btCollisionObject.h.
|
inline |
reserved for Bullet internal usage
Definition at line 367 of file btCollisionObject.h.
|
inline |
Definition at line 438 of file btCollisionObject.h.
|
inline |
Definition at line 433 of file btCollisionObject.h.
|
inline |
Definition at line 405 of file btCollisionObject.h.
|
inline |
Definition at line 410 of file btCollisionObject.h.
|
inline |
Definition at line 443 of file btCollisionObject.h.
|
inline |
Definition at line 309 of file btCollisionObject.h.
|
inline |
Definition at line 328 of file btCollisionObject.h.
|
inline |
Definition at line 337 of file btCollisionObject.h.
|
inline |
Definition at line 558 of file btCollisionObject.h.
|
inline |
Definition at line 531 of file btCollisionObject.h.
|
inline |
Definition at line 536 of file btCollisionObject.h.
|
inline |
users can point to their objects, userPointer is not used by Bullet
Definition at line 526 of file btCollisionObject.h.
|
inline |
Definition at line 463 of file btCollisionObject.h.
|
inline |
Definition at line 372 of file btCollisionObject.h.
|
inline |
Definition at line 377 of file btCollisionObject.h.
|
inline |
Definition at line 182 of file btCollisionObject.h.
|
inline |
Definition at line 212 of file btCollisionObject.h.
|
inline |
Avoid using this internal API call, the extension pointer is used by some Bullet extensions.
If you need to store your own user pointer, use 'setUserPointer/getUserPointer' instead.
Definition at line 271 of file btCollisionObject.h.
|
inline |
Avoid using this internal API call, the extension pointer is used by some Bullet extensions If you need to store your own user pointer, use 'setUserPointer/getUserPointer' instead.
Definition at line 277 of file btCollisionObject.h.
|
inline |
Definition at line 299 of file btCollisionObject.h.
|
inline |
Definition at line 202 of file btCollisionObject.h.
|
inline |
Definition at line 198 of file btCollisionObject.h.
|
inline |
Definition at line 207 of file btCollisionObject.h.
|
inline |
static objects, kinematic and object without contact response don't merge islands
Definition at line 166 of file btCollisionObject.h.
|
inline |
Definition at line 569 of file btCollisionObject.h.
|
virtual |
fills the dataBuffer and returns the struct name (and 0 on failure)
Reimplemented in btSoftBody, btRigidBody, and btMultiBodyLinkCollider.
Definition at line 81 of file btCollisionObject.cpp.
|
virtual |
Reimplemented in btRigidBody.
Definition at line 134 of file btCollisionObject.cpp.
| void btCollisionObject::setActivationState | ( | int | newState | ) | const |
Definition at line 61 of file btCollisionObject.cpp.
|
inline |
Definition at line 176 of file btCollisionObject.h.
|
inline |
Definition at line 399 of file btCollisionObject.h.
|
inline |
Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold.
Definition at line 520 of file btCollisionObject.h.
|
inline |
Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm::
Definition at line 502 of file btCollisionObject.h.
|
inline |
Definition at line 490 of file btCollisionObject.h.
|
inlinevirtual |
Reimplemented in btSoftBody.
Definition at line 221 of file btCollisionObject.h.
|
inline |
Definition at line 458 of file btCollisionObject.h.
|
inline |
the constraint solver can discard solving contacts, if the distance is above this threshold.
0 by default. Note that using contacts with positive distance can improve stability. It increases, however, the chance of colliding with degerate contacts, such as 'interior' triangle edges
Definition at line 189 of file btCollisionObject.h.
|
inline |
Definition at line 341 of file btCollisionObject.h.
|
inline |
Definition at line 563 of file btCollisionObject.h.
|
inline |
Definition at line 286 of file btCollisionObject.h.
|
inline |
Definition at line 313 of file btCollisionObject.h.
|
inline |
Definition at line 479 of file btCollisionObject.h.
|
inline |
Definition at line 238 of file btCollisionObject.h.
|
inline |
Definition at line 427 of file btCollisionObject.h.
|
inline |
Definition at line 421 of file btCollisionObject.h.
|
inline |
Definition at line 415 of file btCollisionObject.h.
|
inline |
Definition at line 448 of file btCollisionObject.h.
|
inline |
Definition at line 304 of file btCollisionObject.h.
|
inline |
Definition at line 323 of file btCollisionObject.h.
|
inline |
Definition at line 332 of file btCollisionObject.h.
|
inline |
users can point to their objects, userPointer is not used by Bullet
Definition at line 548 of file btCollisionObject.h.
|
inline |
Definition at line 553 of file btCollisionObject.h.
|
inline |
users can point to their objects, userPointer is not used by Bullet
Definition at line 542 of file btCollisionObject.h.
|
inline |
Definition at line 469 of file btCollisionObject.h.
|
inline |
Definition at line 382 of file btCollisionObject.h.
Member Data Documentation
|
mutableprotected |
Definition at line 84 of file btCollisionObject.h.
|
protected |
Definition at line 64 of file btCollisionObject.h.
|
protected |
Definition at line 68 of file btCollisionObject.h.
|
protected |
Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold.
Definition at line 115 of file btCollisionObject.h.
|
protected |
Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm::
Definition at line 112 of file btCollisionObject.h.
|
protected |
If some object should have elaborate collision filtering by sub-classes.
Definition at line 118 of file btCollisionObject.h.
|
protected |
Definition at line 78 of file btCollisionObject.h.
|
protected |
Definition at line 69 of file btCollisionObject.h.
|
protected |
Definition at line 81 of file btCollisionObject.h.
|
protected |
Definition at line 91 of file btCollisionObject.h.
|
protected |
Definition at line 66 of file btCollisionObject.h.
|
protected |
Definition at line 92 of file btCollisionObject.h.
|
protected |
Definition at line 125 of file btCollisionObject.h.
|
mutableprotected |
Definition at line 85 of file btCollisionObject.h.
|
protected |
m_extensionPointer is used by some internal low-level Bullet extensions.
Definition at line 71 of file btCollisionObject.h.
|
protected |
Definition at line 87 of file btCollisionObject.h.
|
protected |
Definition at line 65 of file btCollisionObject.h.
|
protected |
time of impact calculation
Definition at line 109 of file btCollisionObject.h.
|
protected |
m_internalType is reserved to distinguish Bullet's btCollisionObject, btRigidBody, btSoftBody, btGhostObject etc.
do not assign your own m_internalType unless you write a new dynamics object class.
Definition at line 98 of file btCollisionObject.h.
|
protected |
Definition at line 62 of file btCollisionObject.h.
|
protected |
Definition at line 61 of file btCollisionObject.h.
|
protected |
m_interpolationWorldTransform is used for CCD and interpolation it can be either previous or future (predicted) transform
Definition at line 58 of file btCollisionObject.h.
|
protected |
Definition at line 80 of file btCollisionObject.h.
|
protected |
Definition at line 120 of file btCollisionObject.h.
|
protected |
Definition at line 88 of file btCollisionObject.h.
|
protected |
Definition at line 89 of file btCollisionObject.h.
|
protected |
m_rootCollisionShape is temporarily used to store the original collision shape The m_collisionShape might be temporarily replaced by a child collision shape during collision detection purposes If it is NULL, the m_collisionShape is not temporarily replaced.
Definition at line 76 of file btCollisionObject.h.
|
protected |
Definition at line 90 of file btCollisionObject.h.
|
protected |
internal update revision number. It will be increased when the object changes. This allows some subsystems to perform lazy evaluation.
Definition at line 123 of file btCollisionObject.h.
|
protected |
Definition at line 106 of file btCollisionObject.h.
|
protected |
Definition at line 104 of file btCollisionObject.h.
|
protected |
users can point to their objects, m_userPointer is not used by Bullet, see setUserPointer/getUserPointer
Definition at line 102 of file btCollisionObject.h.
|
protected |
Definition at line 82 of file btCollisionObject.h.
|
protected |
Definition at line 54 of file btCollisionObject.h.
The documentation for this class was generated from the following files:
